- Автоматическое регулирование технологических процессов
- Технологические процессы и переменные процесса
- Принцип работы и элементы системы автоматического регулирования
- Виды систем автоматического регулирования
- Замкнутая система автоматического регулирования
- Разомкнутая система автоматического регулирования
- Методы автоматического регулирования
- Регулирование с обратной связью
- Регулирование с воздействием по возмущению
- Одноконтурные и многоконтурные системы регулирования
- Автоматическое регулирование и управление В современном мире очень трудно найти технологический процесс, который не был бы автоматизирован. Автоматизация любого технологического процесса подразумевает его контроль, управление, регулирование, сигнализацию, защиту и блокировку. В этой статье рассмотрим основы автоматического управления и регулирования. В окружающем нас мире повсюду протекают различные процессы управления. В управлении нуждается всё: физический или химический процесс, отдельная технологическая установка, производство в целом, промышленность и так далее. Даже общественные отношения. Управление на сегодняшний день является самым сложным видом человеческой деятельности. Нет такой отрасли промышленности, где бы не применялись системы автоматического регулирования и управления. Эти системы разнообразны и по характеру решаемых ими задач и по исполнению. Автоматическое регулирование Регулирование – это поддержание постоянным значения некоторой заданной величины, характеризующей процесс, или изменение его по заданному закону, осуществляемое с помощью изменения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. Системы автоматического регулирования (САР) предназначаются для автоматического поддержания заданного режима технологического процесса или изменения его во времени по заранее заданному или задаваемому в зависимости от каких-то условий закону. При этом имеется в виду, что внешние условия нарушают заданный закон протекания процесса, а система автоматического регулирования стремится его выполнить, преодолевая влияние внешних факторов. Под объектом регулирования понимают аппарат (станок, машину), в котором один или несколько физических параметров должны изменяться по заданным законам при любых возможных внешних условиях. Объектом регулирования могут быть: нагревательная печь, в которой температура должна оставаться постоянной или изменяться по заданному закону; бак, в котором должен поддерживаться заданный уровень жидкости при изменениях ее расхода из бака; электрический двигатель, скорость которого должна оставаться постоянной при изменениях момента сопротивления. Физические величины, закон изменения которых осуществляется автоматическим устройством, называются регулируемыми величинами. Устройство, автоматически поддерживающее заданный закон изменения регулируемой величины, называется автоматическим регулятором. Заданный закон изменения регулируемой величины вырабатывается специальным задающим устройством (задатчиком). Воздействие задатчика на регулятор называется задающим воздействием. Автоматический регулятор постоянно сравнивает текущее значение регулируемой величины с заданным (уставкой) и при наличии рассогласования вырабатывает регулирующее воздействие. Если регулируемая величина отклоняется от заданного значения, управляющий орган воздействует на исполнительный механизм так, чтобы рассогласование между заданным и действительным протеканием процесса было ликвидировано. Человек в эту систему непосредственно вмешаться не может, возможно только косвенное участие – посредством изменения уставки. Нарушение заданного закона протекания технологического процесса происходит в основном из-за внешних воздействий на объект, которые называют возмущающими воздействиями. К ним относятся изменения момента сопротивления на валу двигателя, расхода воды из бака, качества топлива или массы нагреваемых изделий в печи и т. д. Чаще всего устройства автоматического регулирования — системы замкнутые (управление по отклонению). Сигнал, появившись в любой точке замкнутого контура, проходит все звенья системы и возвращается в место своего возникновения (в преобразованном виде). Но бывают и разомкнутые системы (управление по возмущению). В результате этого в системах регулирования могут возникать колебания, в том числе колебания регулируемой величины. Если колебания возрастают, система называется неустойчивой и является неработоспособной. Поэтому первое требование к системам автоматического регулирования — обеспечение устойчивости регулирования, т. е. обеспечение затухания колебаний, возникающих в системе. Необходимо также, чтобы выведенная из состояния равновесия возмущающими воздействиями система регулирования вернулась к заданному положению равновесия возможно точнее и возможно быстрее. Пути построения систем, отвечающих перечисленным требованиям, определяет теория автоматического регулирования. Системы автоматического регулирования делятся по характеру задающего воздействия. Когда регулируемая величина должна быть постоянна, то систему называют системой автоматической стабилизации (или просто системой регулирования). Сюда относятся системы сохранения уровня воды в баке, скорости вращения двигателя и др. Если регулируемая величина изменяется и заранее известен закон (программа) изменения задающего воздействия, система называется системой программного регулирования. Она может, например, осуществлять автоматическое изменение температуры в печи по заранее заданной программе. Если регулируемая величина изменяется, но заранее не известен закон изменения задающего воздействия, систему регулирования называют следящей системой. К следящим системам в известном смысле можно отнести автоматические потенциометры и мосты. В автоматическом потенциометре реверсивный двигатель через ползунок реохорда воздействует на измерительный мост так, чтобы напряжение на выходе позднего изменялось соответственно всем изменениям термо-э. д. с. Очевидно, что термо-э. д. с. изменяется по закону, неизвестному заранее, иначе не нужен был бы сам измерительный прибор. Характер воздействия регулирующего органа на объект бывает непрерывным и прерывистым. Последнее происходит, когда в системе регулирования применяются реле или специальные импульсные устройства. Простейшими регуляторами прерывистого действия являются двухпозиционные регуляторы. Такое название они получили потому, что их регулирующий орган может занимать только два положения (позиции). Очень часто эти позиции соответствуют максимальной и минимальной подаче сырья или энергии в объект. При так называемом трехпозиционном регулировании регулирующий орган может занижать три положения, соответствующие трем значениям регулируемой величины: «мало», «норма», «больше». Для регулирования непрерывных процессов наиболее часто используют физические или программные ПИД-регуляторы. Автоматическое управление Управление – это процесс выработки управляющих воздействий по переводу объекта управления в желаемое состояние. Более полное определение: это осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления. Эти последние слова в данной ситуации являются ключевыми. Система автоматического управления отличается от системы автоматического регулирования тем, что при одних и тех же значениях входных величин, т.е. при одной и той же исходной информации воздействие, которое вырабатывает система может быть различно в зависимости от того, какая цель или какой критерий управления в нее заложен. Назначение систем автоматического управления (САУ) — исключить участие человека в управлении технологическим процессом. Функции человека сводятся к осуществлению пускового импульса. Все остальные операции по управлению процессом, по изменению режимов работы производятся автоматическим устройством. Устройства автоматического управления воздействуют на исполнительные механизмы, приводы рабочих агрегатов, которые изменяют подачу сырья, энергии в аппараты, производят перемещения обрабатываемых изделий и т. д. При автоматическом управлении автоматическое устройство обеспечивает необходимую последовательность, начало и окончание отдельных операций, составляющих рабочий процесс. Подача командного импульса на управляющий орган осуществляется человеком. Управляющий орган воздействует на исполнительный механизм, который подает сырье или энергию в аппарат или производит определенную серию механических перемещений, операций, поддерживая тем самым заданный режим работы установки. Автоматизированная система управления (АСУ) – совокупность математических методов, технических и программных средств, организационных комплексов, а также управленческого и обслуживающего персонала, которые совместно осуществляют рациональное управление объектом управления в соответствии с поставленной целью. Эта система обычно содержит большое количество датчиков, позволяющих измерять различные параметры, большое количество исполнительных устройств, причем их количество необязательно должно совпадать с количеством датчиков. Основным элементом этой системы является управляющее устройство (контроллер), в который заложена программа обработки, информации получаемой с датчиков и критерий управления, исходя из которого система управления и вырабатывает различные управляющие воздействия. При одном и том же значении контролируемых параметров управляющее воздействие в данном случае может быть различным. Системы автоматического регулирования наиболее старые системы автоматизации. Они начали использоваться с середины XIX века (использование автоматических регуляторов в паровых машинах, в железнодорожной автоматике, в электроэнергетике). В 30-е — 60-е годы XX все системы автоматизации (автоматические станки, линии, участки) строились с использованием релейных схем в комбинации с локальными аналоговыми регуляторами с использованием электронных элементов. В то время электрические реле являлись наиболее распространенными элементами электроавтоматики. Они применялсь во всех схемах автоматического контроля, защиты, управления и регулирования. Основная особенность реле — возможность управления достаточно большими мощностями в исполнительных механизмах с помощью незначительных управляющих сигналов от датчиков. Коэффициент усиления реле по мощности может достигать значений десятков тысяч. По мере того, как технологические процессы усложнялись, количество регуляторов на объектах автоматизации росло и системы становились очень громоздкими и тяжелыми в обслуживании, поэтому после появления компьютерных систем управления (микроконтроллеры, микропроцессоры, программируемые логические контроллеры) системы автоматического регулирования стали замещаться системами автоматического управления. Обучение построению автоматических систем регулирования и управления Курс по программированию контроллеров: Дополнение Михаила Алексеева (FB) Традиционно в старой литературе считалось, что система автоматического управления (САУ) и система автоматического регулирования (САР) — это синонимы. Но в книге Dafoss «Преобразователи частоты — просто о сложном» объясняется, что “регулирование” и “управление” это разные вещи. Логика таков: если контур замкнут обратной связью — это САУ, если разомкнут, то — САР. В сети можно встретиться с таким определением: Автоматическое регулирование – поддерживание на постоянном уровне или изменение по заданному закону отдельных регулируемых параметров (температура, давление, расход и т.д.) в объекте управления. Система автоматического регулирования (САР) является подсистемой систем автоматического управления. А Википедия конкретизирует, что САР включает следующие системы: Источник
Автоматическое регулирование технологических процессов
Автоматическое регулирование — это управление технологическими процессами при помощи продвинутых устройств с заранее определенными алгоритмами.
В быту, например, автоматическое регулирование может осуществляться при помощи термостата, который измеряет и поддерживает комнатную температуру на заданном уровне.
 Автоматическое регулирование
Автоматическое регулирование
После того, как желательная температура задана, термостат автоматически контролирует комнатную температуру и включает или отключает нагреватель или воздушный кондиционер по мере необходимости, чтобы поддержать заданную температуру.
На производстве управление процессами обычно осуществляется средствами КИП и А, которые измеряют и поддерживают на необходимом уровне технологические параметры процесса, такие как: температура, давление, уровень и расход. Ручное регулирование на более-менее масштабном производстве затруднительно по ряду причин, а многие процессы вообще невозможно регулировать вручную.
Технологические процессы и переменные процесса
Для нормального выполнения технологических процессов необходимо контролировать физические условия их протекания. Такие физические параметры, как температура, давление, уровень и расход могут изменяться по многим причинам, и их изменения влияют на технологический процесс. Эти изменяемые физические условия называются «переменными процесса».
Некоторые из них могут понизить эффективность производства и увеличить производственные затраты. Задачей системы автоматического регулирования является минимизация производственных потерь и затрат на регулирование, связанных с произвольным изменением переменных процесса.
На любом производстве осуществляется воздействие на сырьё и другие исходные компоненты для получения целевого продукта. Эффективность и экономичность работы любого производства зависит от того, как технологические процессы и переменные процесса управляются посредством специальных систем регулирования.
На тепловой электростанции, работающей на угле, уголь размалывается и затем сжигается, чтобы произвести тепло, необходимое для преобразования воды в пар. Пар может использоваться по множеству назначений: для работы паровых турбин, тепловой обработки или сушки сырых материалов. Ряд операций, которые эти материалы и вещества проходят, называется «технологическим процессом». Слово «процесс» также часто используется по отношению к индивидуальным операциям. Например, операция по размолу угля или превращения воды в пар могла бы называться процессом.
Принцип работы и элементы системы автоматического регулирования
В случае системы автоматического регулирования наблюдение и регулирование производится автоматически при помощи заранее настроенных приборов. Аппаратура способна выполнять все действия быстрее и точнее, чем в случае ручного регулирования.
Действие системы может быть разделено на две части: система определяет изменение значения переменной процесса и затем производит корректирующее воздействие, вынуждающее переменную процесса вернуться к заданному значению.
Система автоматического регулирования содержит четыре основных элемента: первичный элемент, измерительный элемент, регулирующий элемент и конечный элемент.
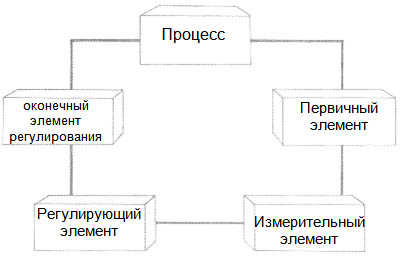 Элементы системы автоматического регулирования
Элементы системы автоматического регулирования
Первичный элемент воспринимает величину переменной процесса и превращает его в физическую величину, которое передается в измерительный элемент. Измерительный элемент преобразовывает физическое изменение, произведенное первичным элементом, в сигнал, представляющий величину переменной процесса.
Выходной сигнал от измерительного элемента посылается к регулирующему элементу. Регулирующий элемент сравнивает сигнал от измерительного элемента с опорным сигналом, который представляет собой заданное значение и вычисляет разницу между этими двумя сигналами. Затем регулирующий элемент производит корректирующий сигнал, который представляет собой разницу между действительной величиной переменной процесса и ее заданным значением.
Выходной сигнал от регулирующего элемента посылается к конечному элементу регулирования. Конечный элемент регулирования преобразовывает получаемый им сигнал в корректирующее воздействие, которое вынуждает переменную процесса возвратиться к заданному значению.
В дополнение к четырем основным элементам, системы регулирования процессами могут иметь вспомогательное оборудование, которое обеспечивает информацией о величине переменной процесса. Это оборудование может включать такие приборы как самописцы, измерители и устройства сигнализации.
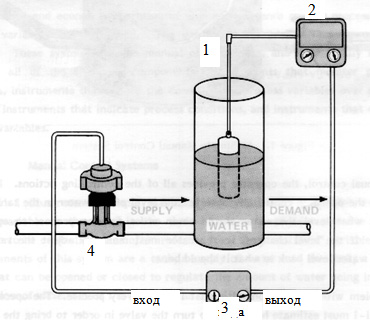 Схема простой системы автоматического регулирования
Схема простой системы автоматического регулирования
Виды систем автоматического регулирования
Имеются два основных вида автоматических систем регулирования: замкнутые и разомкнутые, которые различаются по своим характеристикам и следовательно — по уместности применения.
Замкнутая система автоматического регулирования
В замкнутой системе информация о значении регулируемой переменной процесса проходит через всю цепочку приборов и устройств, предназначенных для контроля и регулирования этой переменной. Таким образом, в замкнутой системе производится постоянное измерение регулируемой величины, её сравнение с задающей величиной и оказывается соответствующее воздействие на процесс для приведения регулируемой величины в соответствие с задающей величиной.
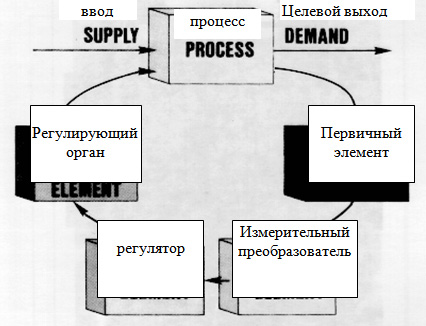 Схема замкнутой системы автоматического регулирования
Схема замкнутой системы автоматического регулирования
Например, подобная система хорошо подходит для контроля и поддержания необходимого уровня жидкости в резервуаре. Буек воспринимает изменение уровня жидкости. Измерительный преобразователь преобразует изменения уровня в сигнал, который отправляет на регулятор. Который, в свою очередь, сравнивает полученный сигнал с необходимым уровнем, заданным заранее. После регулятор вырабатывает корректирующий сигнал и отправляет его на регулирующий клапан, который корректирует поток воды.
Разомкнутая система автоматического регулирования
В разомкнутой системе нет замкнутой цепочки измерительных и обрабатывающих сигнал приборов и устройств от выхода до входа процесса, и воздействие регулятора на процесс не зависит от результирующего значения регулируемой переменной. Здесь не производится сравнение между текущим и желаемым значением переменной процесса и не вырабатывается корректирующее воздействие.
 Схема разомкнутой системы автоматического регулирования
Схема разомкнутой системы автоматического регулирования
Один из примеров разомкнутой системы регулирования — автоматическая мойка автомобилей. Это технологический процесс по мойке автомобилей и все необходимые операции чётко определены. Когда автомобиль выходит с мойки предполагается, что он должен быть чистым. Если автомобиль недостаточно чист, то система этого не обнаруживает. Здесь нет никакого элемента, который бы давал информацию об этом и корректировал процесс.
На производстве некоторые разомкнутые системы используют таймеры, чтобы гарантировать, что ряд последовательных операций выполнен. Этот вид разомкнутого регулирования может быть приемлем, если процесс не очень ответственный. Однако, если процесс требует, чтобы выполнение некоторых условий было проверено и при необходимости были бы сделаны корректировки, разомкнутая система не приемлема. В таких ситуациях необходимо применить замкнутую систему.
Методы автоматического регулирования
Системы автоматического регулирования могут создаваться на основе двух основных методов регулирования: регулирования с обратной связью, которое работает путем исправления отклонений переменной процесса после того, как они произошли; и с воздействием по возмущению, которое предотвращает возникновение отклонений переменной процесса.
Регулирование с обратной связью
Регулирование с обратной связью — это такой способ автоматического регулирования, когда измеренное значение переменной процесса сравнивается с ее уставкой срабатывания и предпринимаются действия для исправления любого отклонения переменной от заданного значения.
 Система ручного регулирования с обратной связью
Система ручного регулирования с обратной связью
Основным недостатком системы регулирования с обратной связью является то, что она не начинает регулировки процесса до тех пор, пока не произойдет отклонение регулируемой переменной процесса от значения ее уставки.
Температура должна измениться, прежде чем регулирующая система начнет открывать или закрывать управляющий клапан на линии пара. В большинстве систем регулирования такой тип регулирующего действия приемлем и заложен в конструкцию системы.
В некоторых промышленных процессах, таких как изготовление лекарственных препаратов, нельзя допустить отклонение переменной процесса от значения уставки. Любое отклонение может привести к потере продукта. В этом случае необходима система регулирования, которая бы предвосхищала изменения процесса. Такой упреждающий тип регулирования обеспечивается системой регулирования с воздействием по возмущению.
Регулирование с воздействием по возмущению
Регулирование по возмущению — это регулирование с опережением, потому что прогнозируется ожидаемое изменение в регулируемой переменной и принимаются меры прежде, чем это изменение происходит.
Это фундаментальное различие между регулированием с воздействием по возмущению и регулированием с обратной связью. Контур регулирования с воздействием по возмущению пытается нейтрализовать возмущение прежде, чем оно изменит регулируемую переменную, в то время, как контур регулирования с обратной связью пытается отрабатывать возмущение после того, как оно воздействует на регулируемую переменную.
 Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению
Система регулирования с воздействием по возмущению имеет очевидное преимущество перед системой регулирования с обратной связью. При регулировании по возмущению в идеальном случае величина регулируемой переменной не изменяется, она остается на значении ее уставки. Но ручное регулирование по возмущению требует более сложного понимания того влияния, которое возмущение окажет на регулируемую переменную, а также использования более сложных и точных приборов.
На заводе редко можно встретить чистую систему регулирования по возмущению. Когда используется система регулирования по возмущению, она обычно сочетается с системой регулирования с обратной связью. И даже в этом случае регулирование по возмущению предназначается только для более ответственных операций, которые требуют очень точного регулирования.
Одноконтурные и многоконтурные системы регулирования
Одноконтурная система регулирования или простой контур регулирования — это система регулирования с одним контуром, который обычно содержит только один первичный чувствительный элемент и обеспечивает обработку только одного входного сигнала на регулятор.
 Одноконтурная система регулирования
Одноконтурная система регулирования
Некоторые системы регулирования имеют два или больше первичных элемента и обрабатывают больше, чем один входной сигнал на регулятор. Эти системы автоматического регулирования называются «многоконтурными» системами регулирования.
 Многоконтурная система регулирования
Многоконтурная система регулирования
Источник
Автоматическое регулирование и управление
В современном мире очень трудно найти технологический процесс, который не был бы автоматизирован. Автоматизация любого технологического процесса подразумевает его контроль, управление, регулирование, сигнализацию, защиту и блокировку. В этой статье рассмотрим основы автоматического управления и регулирования.
В окружающем нас мире повсюду протекают различные процессы управления. В управлении нуждается всё: физический или химический процесс, отдельная технологическая установка, производство в целом, промышленность и так далее. Даже общественные отношения. Управление на сегодняшний день является самым сложным видом человеческой деятельности.
Нет такой отрасли промышленности, где бы не применялись системы автоматического регулирования и управления. Эти системы разнообразны и по характеру решаемых ими задач и по исполнению.

Автоматическое регулирование
Регулирование – это поддержание постоянным значения некоторой заданной величины, характеризующей процесс, или изменение его по заданному закону, осуществляемое с помощью изменения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Системы автоматического регулирования (САР) предназначаются для автоматического поддержания заданного режима технологического процесса или изменения его во времени по заранее заданному или задаваемому в зависимости от каких-то условий закону. При этом имеется в виду, что внешние условия нарушают заданный закон протекания процесса, а система автоматического регулирования стремится его выполнить, преодолевая влияние внешних факторов.
Под объектом регулирования понимают аппарат (станок, машину), в котором один или несколько физических параметров должны изменяться по заданным законам при любых возможных внешних условиях. Объектом регулирования могут быть:
нагревательная печь, в которой температура должна оставаться постоянной или изменяться по заданному закону;
бак, в котором должен поддерживаться заданный уровень жидкости при изменениях ее расхода из бака;
электрический двигатель, скорость которого должна оставаться постоянной при изменениях момента сопротивления.
Физические величины, закон изменения которых осуществляется автоматическим устройством, называются регулируемыми величинами. Устройство, автоматически поддерживающее заданный закон изменения регулируемой величины, называется автоматическим регулятором.
Заданный закон изменения регулируемой величины вырабатывается специальным задающим устройством (задатчиком). Воздействие задатчика на регулятор называется задающим воздействием.
Автоматический регулятор постоянно сравнивает текущее значение регулируемой величины с заданным (уставкой) и при наличии рассогласования вырабатывает регулирующее воздействие. Если регулируемая величина отклоняется от заданного значения, управляющий орган воздействует на исполнительный механизм так, чтобы рассогласование между заданным и действительным протеканием процесса было ликвидировано. Человек в эту систему непосредственно вмешаться не может, возможно только косвенное участие – посредством изменения уставки.

Нарушение заданного закона протекания технологического процесса происходит в основном из-за внешних воздействий на объект, которые называют возмущающими воздействиями. К ним относятся изменения момента сопротивления на валу двигателя, расхода воды из бака, качества топлива или массы нагреваемых изделий в печи и т. д.
Чаще всего устройства автоматического регулирования — системы замкнутые (управление по отклонению). Сигнал, появившись в любой точке замкнутого контура, проходит все звенья системы и возвращается в место своего возникновения (в преобразованном виде). Но бывают и разомкнутые системы (управление по возмущению).
В результате этого в системах регулирования могут возникать колебания, в том числе колебания регулируемой величины. Если колебания возрастают, система называется неустойчивой и является неработоспособной. Поэтому первое требование к системам автоматического регулирования — обеспечение устойчивости регулирования, т. е. обеспечение затухания колебаний, возникающих в системе.
Необходимо также, чтобы выведенная из состояния равновесия возмущающими воздействиями система регулирования вернулась к заданному положению равновесия возможно точнее и возможно быстрее. Пути построения систем, отвечающих перечисленным требованиям, определяет теория автоматического регулирования.

Системы автоматического регулирования делятся по характеру задающего воздействия. Когда регулируемая величина должна быть постоянна, то систему называют системой автоматической стабилизации (или просто системой регулирования). Сюда относятся системы сохранения уровня воды в баке, скорости вращения двигателя и др.
Если регулируемая величина изменяется и заранее известен закон (программа) изменения задающего воздействия, система называется системой программного регулирования. Она может, например, осуществлять автоматическое изменение температуры в печи по заранее заданной программе.
Если регулируемая величина изменяется, но заранее не известен закон изменения задающего воздействия, систему регулирования называют следящей системой. К следящим системам в известном смысле можно отнести автоматические потенциометры и мосты.
В автоматическом потенциометре реверсивный двигатель через ползунок реохорда воздействует на измерительный мост так, чтобы напряжение на выходе позднего изменялось соответственно всем изменениям термо-э. д. с. Очевидно, что термо-э. д. с. изменяется по закону, неизвестному заранее, иначе не нужен был бы сам измерительный прибор.
Характер воздействия регулирующего органа на объект бывает непрерывным и прерывистым. Последнее происходит, когда в системе регулирования применяются реле или специальные импульсные устройства.
Простейшими регуляторами прерывистого действия являются двухпозиционные регуляторы. Такое название они получили потому, что их регулирующий орган может занимать только два положения (позиции). Очень часто эти позиции соответствуют максимальной и минимальной подаче сырья или энергии в объект.
При так называемом трехпозиционном регулировании регулирующий орган может занижать три положения, соответствующие трем значениям регулируемой величины: «мало», «норма», «больше».
Для регулирования непрерывных процессов наиболее часто используют физические или программные ПИД-регуляторы.
Автоматическое управление
Управление – это процесс выработки управляющих воздействий по переводу объекта управления в желаемое состояние.
Более полное определение: это осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления. Эти последние слова в данной ситуации являются ключевыми.
Система автоматического управления отличается от системы автоматического регулирования тем, что при одних и тех же значениях входных величин, т.е. при одной и той же исходной информации воздействие, которое вырабатывает система может быть различно в зависимости от того, какая цель или какой критерий управления в нее заложен.

Назначение систем автоматического управления (САУ) — исключить участие человека в управлении технологическим процессом. Функции человека сводятся к осуществлению пускового импульса. Все остальные операции по управлению процессом, по изменению режимов работы производятся автоматическим устройством.
Устройства автоматического управления воздействуют на исполнительные механизмы, приводы рабочих агрегатов, которые изменяют подачу сырья, энергии в аппараты, производят перемещения обрабатываемых изделий и т. д.
При автоматическом управлении автоматическое устройство обеспечивает необходимую последовательность, начало и окончание отдельных операций, составляющих рабочий процесс. Подача командного импульса на управляющий орган осуществляется человеком. Управляющий орган воздействует на исполнительный механизм, который подает сырье или энергию в аппарат или производит определенную серию механических перемещений, операций, поддерживая тем самым заданный режим работы установки.

Автоматизированная система управления (АСУ) – совокупность математических методов, технических и программных средств, организационных комплексов, а также управленческого и обслуживающего персонала, которые совместно осуществляют рациональное управление объектом управления в соответствии с поставленной целью.
Эта система обычно содержит большое количество датчиков, позволяющих измерять различные параметры, большое количество исполнительных устройств, причем их количество необязательно должно совпадать с количеством датчиков.
Основным элементом этой системы является управляющее устройство (контроллер), в который заложена программа обработки, информации получаемой с датчиков и критерий управления, исходя из которого система управления и вырабатывает различные управляющие воздействия. При одном и том же значении контролируемых параметров управляющее воздействие в данном случае может быть различным.
Системы автоматического регулирования наиболее старые системы автоматизации. Они начали использоваться с середины XIX века (использование автоматических регуляторов в паровых машинах, в железнодорожной автоматике, в электроэнергетике). В 30-е — 60-е годы XX все системы автоматизации (автоматические станки, линии, участки) строились с использованием релейных схем в комбинации с локальными аналоговыми регуляторами с использованием электронных элементов.
В то время электрические реле являлись наиболее распространенными элементами электроавтоматики. Они применялсь во всех схемах автоматического контроля, защиты, управления и регулирования.
Основная особенность реле — возможность управления достаточно большими мощностями в исполнительных механизмах с помощью незначительных управляющих сигналов от датчиков. Коэффициент усиления реле по мощности может достигать значений десятков тысяч.

По мере того, как технологические процессы усложнялись, количество регуляторов на объектах автоматизации росло и системы становились очень громоздкими и тяжелыми в обслуживании, поэтому после появления компьютерных систем управления (микроконтроллеры, микропроцессоры, программируемые логические контроллеры) системы автоматического регулирования стали замещаться системами автоматического управления.
Обучение построению автоматических систем регулирования и управления
Курс по программированию контроллеров:
Дополнение Михаила Алексеева (FB)
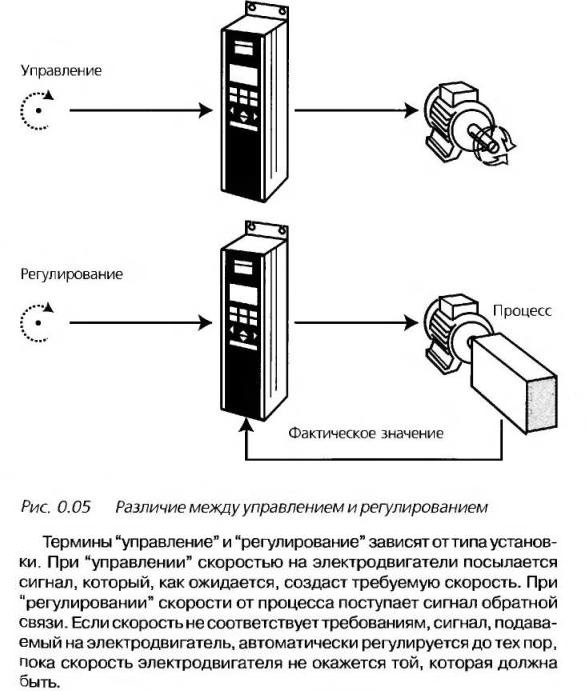
Традиционно в старой литературе считалось, что система автоматического управления (САУ) и система автоматического регулирования (САР) — это синонимы. Но в книге Dafoss «Преобразователи частоты — просто о сложном» объясняется, что “регулирование” и “управление” это разные вещи. Логика таков: если контур замкнут обратной связью — это САУ, если разомкнут, то — САР.
В сети можно встретиться с таким определением: Автоматическое регулирование – поддерживание на постоянном уровне или изменение по заданному закону отдельных регулируемых параметров (температура, давление, расход и т.д.) в объекте управления. Система автоматического регулирования (САР) является подсистемой систем автоматического управления.
А Википедия конкретизирует, что САР включает следующие системы:
Источник